自走ロボットの「回転部で切れる/ノイズが乗る」を減らす――IP65対応スリップリングで実現する長時間稼働
Written by n_hiramatsu

1. 自走ロボットで発生しやすい「回転部の伝送トラブル」とは
2. 摩耗・寿命・ノイズが起きる理由とIP等級の基礎
3. 解決の方向性へのアプローチ
4. スリップリングのタイプ別特徴と用途別の考え方
5. 導入事例:警備ロボット
6. お問合せ
1. 自走ロボットで発生しやすい「回転部の伝送トラブル」とは
業務用ロボット(セキュリティロボット・配膳ロボット・お掃除ロボット・AMR/AGV)では、タワー上のセンサー旋回、LIDARの連続回転、マストやアームのケーブル巻取りなど、回転しながら電力と信号を伝送する場面が必ずあります。そこで用いられるのがスリップリングです。
よくあるお悩み事項は以下の通りです。
- 走行中にセンサー通信が瞬断する(イーサネット/シリアルが不安定)
- 長時間稼働で接触抵抗が増え、発熱や電圧降下が大きくなる
- 粉塵・飛沫で導通が不安定、IP65の要否が判断できない
- 摩耗粉の堆積によりメンテ周期が短い、寿命予測が立てづらい
本記事は、こうした課題の背景と解決アプローチ例をご紹介します。
2. 摩耗・寿命・ノイズが起きる理由とIP等級の基礎
2-1. 接触構造と材料が左右する「摩耗・接触抵抗・発熱」
スリップリングは回転側リングと固定側ブラシの接触で導通します。接触点数(マルチポイント)やブラシ材料(貴金属/銀合金/カーボン)、接触圧、回転速度が摩耗と接触抵抗に影響します。摩耗が進むと微小な断続導通が増え、回転中のノイズ・チャタリングが発生、信号品質(イーサネット、エンコーダ、同軸ビデオ)が悪化します。
2-2. 環境起因:粉塵・湿気・油ミスト・温度
工場や商業施設の清掃・配膳では、細かい粉塵や油ミスト、水滴の付着が避けられません。防塵防水(IP等級)の不足、あるいはシールの劣化があると、接触面に異物が侵入して接触抵抗が増加、長時間稼働での発熱・ノイズの誘因になります。
2-3. EMI/グラウンド設計とケーブル引き回し
高速通信やモータ駆動の同居により、EMI(電磁妨害)やグラウンドの取り回しが不適切だと、回転部で拾ったノイズがセンサー出力に重畳し、自走ロボットの自己位置推定や安全制御を不安定にします。ツイストペアの保持、シールドの360°接続、ケーブルストレインリリーフが重要です。
2-4. 「IP65」の意味と「IP54/66/67」との違い
IP65は「粉塵が内部に侵入せず、あらゆる方向からの噴流水に対して保護」を意味します。IP54は粉塵の侵入に制限があり、飛沫に耐性、IP66は強い噴流水、IP67は一時的な水没まで耐える指標です。床洗浄機や屋外巡回など水しぶきが多い用途では、IP65以上が検討対象になりますが、シール強化は回転トルク上昇や寸法増にもつながるため、環境・洗浄方法・保守インターバルを含めた全体設計で決めます。
3. 解決へのアプローチ
3-1. 選定基準
スリップリングを選定する際には、使用環境や伝送要件、寿命設計など、さまざまな観点から総合的に判断することが重要です。ここでは、業務用ロボット向けスリップリングの選定にあたり、特に考慮すべき主な基準について整理します。
- 環境定義: 粉塵/水滴/薬品/油ミスト/温湿度、洗浄方法(高圧洗浄の有無)
- 伝送要件: 電力(最大電流・起動突入)、信号(イーサネット/RS-485/CAN/同軸/エンコーダ)
- 寿命設計: 回転速度、総回転数、 duty 比、許容接触抵抗、MTBF/寿命曲線
- サイズ/取付:スルーボア径、外径、高さ、許容回転トルク
- EMI/グランド:シールド連続性、ドレイン線、筐体接地
3-2. 設計時のポイント
設計にあたっては、信号品質や耐久性、メンテナンス性など、実際の運用を見据えた細かな工夫が求められます。以下に、設計段階で押さえておきたい具体的なポイントをまとめます。
- 接触方式:マルチポイント/貴金属系で低ノイズが必要か
- 電力と信号の分離:リング配列やシールドでクロストークを抑制
- 回転トルクとケーブル応力:ストレインリリーフとループ長を最小化
- 防塵防水:IP65以上が必要か(洗浄圧・水源距離・飛沫角度)
- メンテナンス性:摩耗粉の逃げ道、交換時間、在庫部品の共通化
- 検証:長時間連続稼働試験(72h以上)、温湿度サイクル、塵埃試験
- ログ:接触抵抗・温度・消費電流のトレンドを予知保全に活用
3-3. 運用ベストプラクティス
- 定期点検の可観測化:回転トルク、温度、エラー率をダッシュボード化
- 清掃/洗浄手順:高圧洗浄の有無でIP選定、シール部への直接噴射を避ける
- スペア戦略:予備ユニットを回す「先行交換」でダウンタイムを短縮
4. スリップリングのタイプ別特徴と用途別の考え方
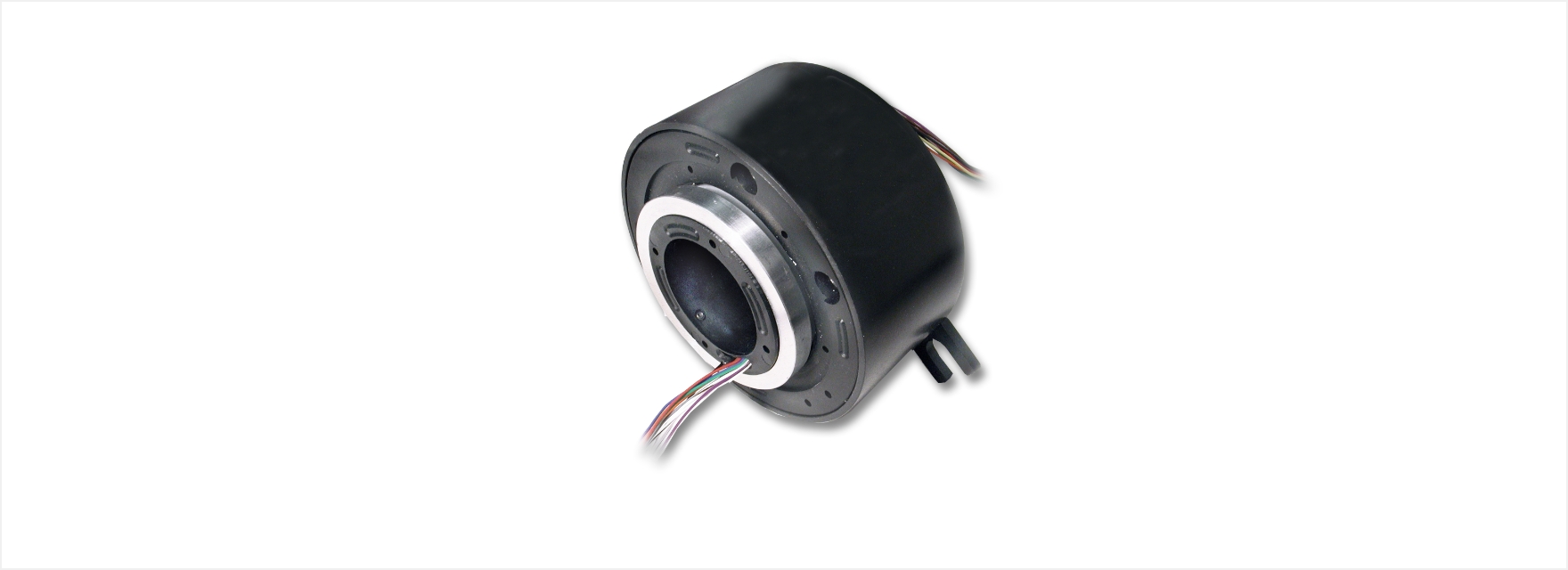
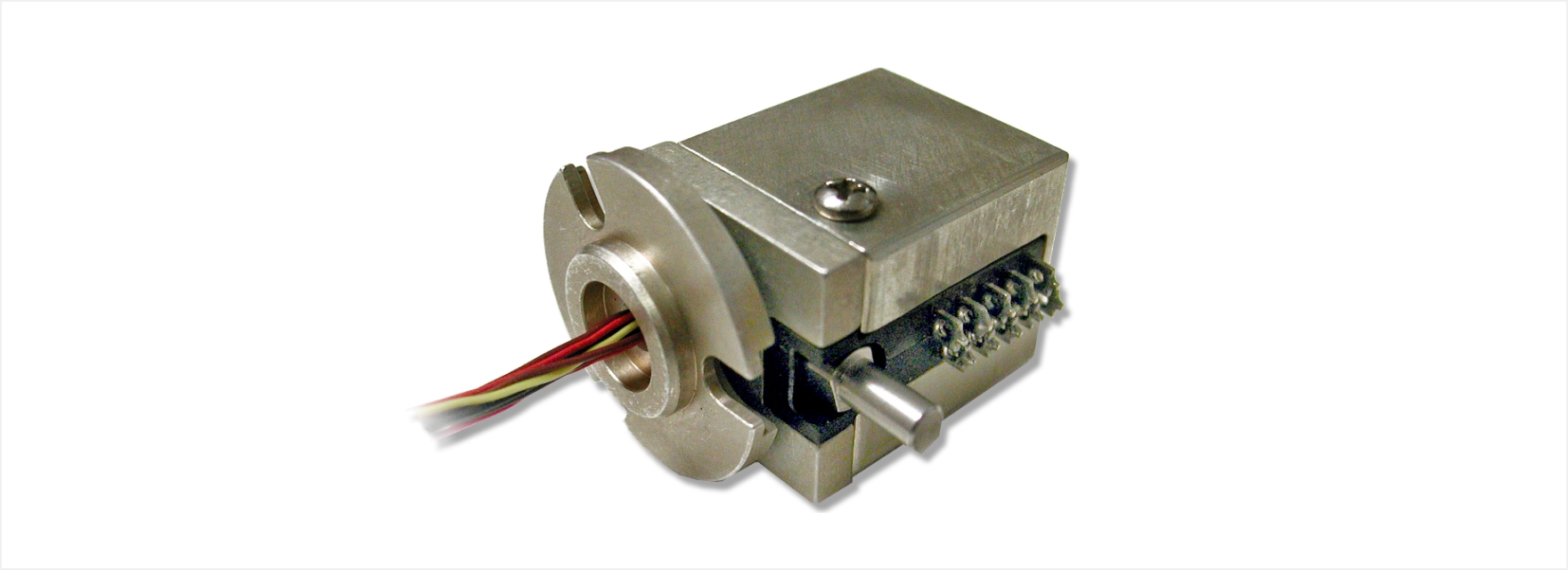
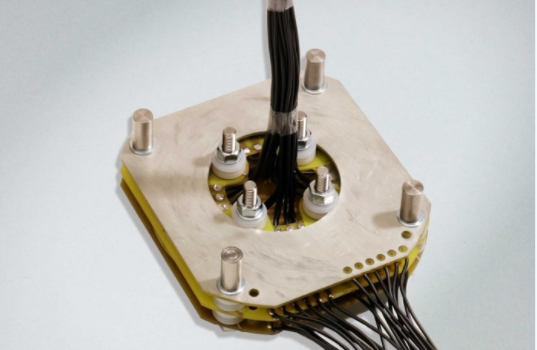
4-1. タイプの違い(カプセル/スルーボア/パンケーキ/ハイブリッド)
カプセル型はコンパクトで小電流・信号向け、スルーボア型は中央貫通でシャフトや配管を活かせます。パンケーキ型は高さ制約に有利ですが、接触径が大きく摩耗傾向に注意。ハイブリッドは電力と信号、同軸、イーサネット/エンコーダ/電源を一体化でき、ロボットの省スペース化に寄与します。
4-2. 「高温環境でも動作するスリップリングの選び方」
清掃ロボットのモータ周辺や屋外巡回での直射日光下では温度上昇が避けられません。材料・潤滑・シールは温度で特性が変わります。「高温環境 対策 方法」の観点では、許容温度範囲、熱抵抗、通電損、放熱経路を確認します。必要に応じて電力リングを増やし、発熱を分散するのが定石です。
4-3. 「防塵防水IP65以上が必要なケースと不要なケース」
床洗浄機・屋外警備・食品売場の夜間清掃など水しぶきが常態ならIP65以上を検討。一方で、屋内配膳ロボットの穏やかな環境では、IP54でも十分な場合があり、回転トルク・コスト・寿命のトレードオフ評価が重要です。
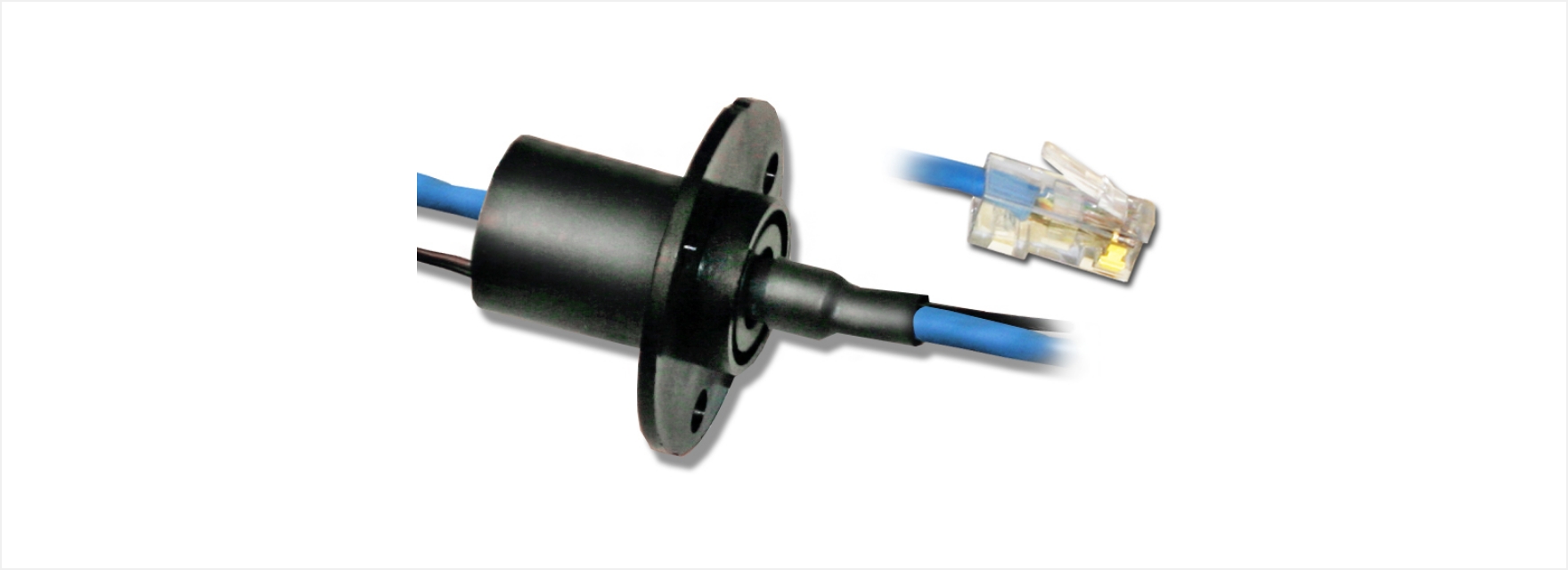
4-4. 「通信品質を落とさないイーサネット対応の考え方」
100BASE-TX/1000BASE-T対応では、特性インピーダンスの連続性、接触点の均質性、ケーブルツイストの保持が鍵。「イーサネット スリップリング ノイズ 対策」の視点で、シールド360°接続とグランド計画を明確化します。
4-5. 実装・検証のポイント
- 振動環境:走破時の段差やドック進入で加振 → 接触安定性と固定方法を評価
- ケーブルマネジメント:引っ張り・ねじれを避け、最短で束ねる
- 長時間連続試験:72h〜168h、温湿度サイクル、粉塵ばく露、洗浄耐性
5. 導入事例:警備ロボット向けイーサネットスリップリング

商業施設向け警備ロボットでは、3D LiDARによる高精度な監視・検知が求められます。特に、LiDARの仕様上「長時間の高速回転」が必要となるため、スリップリングの選定が重要なポイントとなります。
今回の事例では、ブラシタイプの「AC6438」を採用。Ether-net通信など多様な信号伝送にも対応できることに加え、「ファイバーブラシによる長寿命」「高い耐久性」「メンテナンスフリー」といったMOOG製品ならではの特長が評価されました。
警備ロボットは、商業施設内で長時間・連続稼働するため、部品の耐久性やメンテナンス性が運用コストや安全性に直結します。AC6438は、こうした厳しい要求に応える製品として、警備ロボットの安定稼働と高性能な監視システムの実現に貢献しています。
今後も、商業施設向けロボット分野において、MOOG社スリップリングの高い信頼性と技術力が注目されることでしょう。
「AC6438」詳しくはこちら
イーサネットスリップリングはこちら
スリップリング製品一覧はこちら